
Concepts of Control Theory
| Read article about how control theory concepts are applied in many frameworks like Spring Security, JMX, JAAS on www.serverside.com! |
Control theory is a discipline originated in mathematics and engineering science but was adopted also in psychology, social sciences and other research domains. It deals with influencing the behavior and operational conditions of dynamical systems. The fundamentals of control theory can also be applied to software architectures that have a need for controlling dynamical behavior. Control theory deals with topics that are also of importance in software development:
- Stability of a dynamical system is described by Lyapunov stability criteria (business rules must be obeyed and functionality must be granted)
- Observability is the possibility of observing the state of a system through output measurements
- Controllability is the possibility of forcing the system into a particular state by using an appropriate control signal
- Robustness of a control system is given if a controllers properties do not change much if applied to a system slightly different from the one used for its synthesis
In control theory a lot of models have been developed but they all can be put down to two basic designs, the closed loop and the open loop controller. In the following figure a common closed loop controller design is shown:
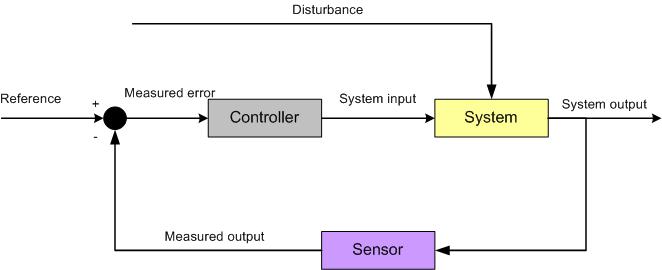
An example for a closed loop control system is the heating system of a house for controlling temperature. A sensor monitors the output of the system which is in this case the air temperature. The controller compares the measured values with a reference or setpoint and calculates from the reference rules if the heater must be switched on or a hot water valve must be opened. The heater or hot water valve can be regarded as an actuator. In control theory an actuator is a mechanical device for controlling the system. It is operated by a source of energy, usually in the form of an electric current or hydraulic fluid pressure, and converts that into some kind of motion. The heater increases the temperature which is then an input variable of the system. This is an example of a feedback controller: The variable measured by the sensor is the same as the controller is trying to control. The controlled variable is "fed back" into the controller. Feedback control usually results in intermediate periods where the controlled variable is not at the desired setpoint. This slowness of feedback can be minimized by using an appropriate open loop controller:
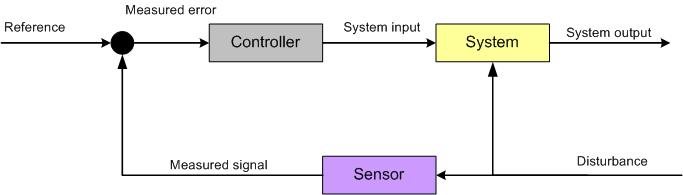
In this design a disturbance is measured by the sensor before it has an effect on the system. If in the above example it is known that opening a window will decrease the air temperature a sensor could measure the opening of the window and switch on the heater before the air temperature actually has gone down. This is an example of a feed-forward controller: The controller acts before a disturbance affects the system. The difficulty with feed-forward controllers is that all possible disturbances and their influence on the system must be known, accounted for and observed by an appropriate sensor. If in the example the opening of the door is not observed the feed-forward controller will let the house cool down.
Another characteristic of controllers is how many variables of the system they control:
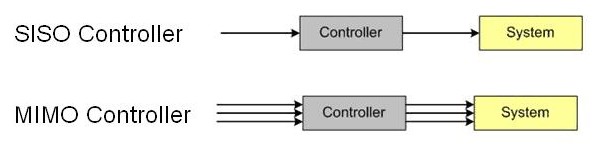
Single-Input-Single-Output controllers (SISO) measure one system variable like air temperature in the above example of the house heating system. Multi-Input-Multi-Output controllers control more than one system variables. In real control systems often a synthesis of open and closed loop, feedback and feed-forward, SISO and MIMO controllers are used in sequential, hierarchical, nested or networked combination.
The Cibet framework is a control system for controlling business processes on resources which can be described in the following figure:
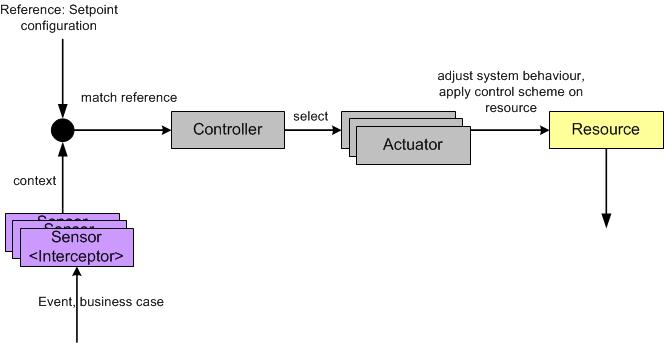
In fact it is an open loop controller. An event is observed by a sensor which is appropriate to the controlled resource. The controller checks this signal, compares it with the configuration and actual context and decides which actions to take and which actuator to apply. The actions of the actuators are then an input to the resource.